「成功率53.5%から100%に向上」
「次世代AI システム構築に重要な意義」
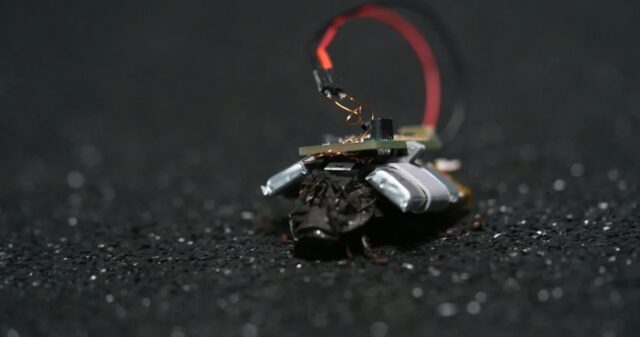
中国の研究チームが“人の手に限りなく近い”把持能力を持つロボットハンドを開発した。
中国官営英字メディア「グローバル・タイムズ」は11日、「北京大学と北京通用人工智能研究院(BIGAI)などで構成される研究チームがロボットハンドシステム『F-TAC ハンド』を発表した」と報じた。

報道によると、研究チームは関連研究成果を9日に国際学術誌「ネイチャー」の姉妹誌「ネイチャー・マシン・インテリジェンス」に掲載した。
人間が手で物体をつかむ際は触覚の変化を感知し、それに応じて運動能力が作用する。この二つの機能の統合は、ロボット工学における長年の課題とされてきた。
論文の共同筆頭著者であるBIGAIの博士課程学生・李宇阳(リー・ユーヤン)氏は、グローバルタイムズの取材に対し、人間に近い多様な把持動作を可能にするアルゴリズムを開発したと語った。さらに「この確率モデルベースのアルゴリズムは人間の動きと非常に類似した把持動作を実現できる」と語った。
北京大学人工知能研究所の朱毅鑫(シュ・イーシン)准教授は「この研究は次世代AIシステム構築に重要な意義を持つ」とし、「研究関連の内容を数千の産業に統合し、中国のAIロボット開発を加速させる」と強調した。
研究チームによると、実験結果としてF-TAC ハンドは動作中の障害にも即応可能で、接触からわずか0.1秒で異常を感知、代替解決策に切り替えることができた。物体把持テストを600回実施した結果、従来のロボットハンドと比較して成功率が53.5%から100%に向上した。
人間に類似したロボットハンドの開発は、中国政府の未来産業育成戦略の一環である具身知能(embodied intelligence・物理的実体を持ち実環境と相互作用するAI)の核心として評価されている。

















コメント0