宇宙空間で人間に代わり、作業を担うロボットの開発が進んでいる。日本のロボットスタートアップ、GITAI(ギタイ)は、宇宙環境での実運用を想定した多様な作業用ロボットを公開した。
代表例が「インチワーム(Inchworm)」ロボットだ。宇宙ステーションや人工衛星の外部を移動しながら、機器の点検・交換や組み立て作業を行うことを想定して設計した。固定点を交互につかんで前進する構造を採用し、微小重力環境でも安定した移動を可能にした。
軌道上作業向けには「S2」ロボットアームを活用する。S2は国際宇宙ステーション(ISS)外部での遠隔・自律操作試験を終え、実際の宇宙環境で作業が可能であることを実証した。GITAIは、この技術を発展させた「S10」ロボットアームも開発中で、大型構造物の組み立てを主な用途に据えた。
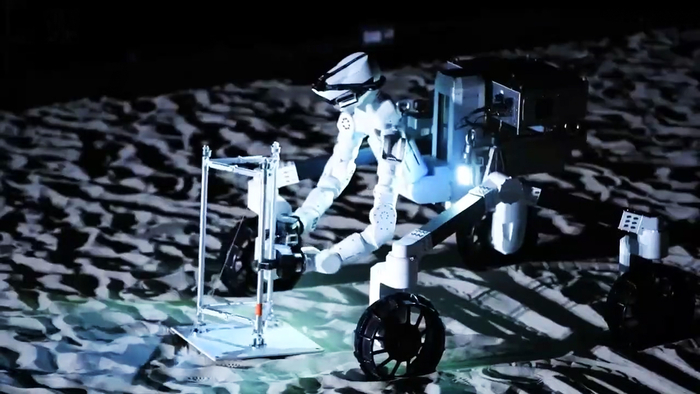
月面探査向けには「ルナ・ローバー(Lunar Rover)」を投入する。月面を走行しながら探査や各種作業を行う設計で、将来的には月面インフラの構築や探査ミッションへの活用を目指して開発を進めた。
GITAIは、これらのロボットによって人が直接行うことが難しい宇宙作業を代替し、長期的には宇宙インフラの構築や運用にかかるコストを大幅に削減する方針を正式に示した。



















コメント0